
- BLDC학습
- ESC학습
1. BLDC(BLushless Direct Current) Motor
이 모터는 가전제품, 정보통신, 자동차, 첨단 의료기기 로봇 등 다용한 기기에서 폭넓게 사용된다.
1)DC Motor와 BLDC Motor의 구조
DC Motor
브러시에 의해 전류가 코일에 전달되어 회전력을 생성함
브러시의 마찰로 모터으 ㅣ중요한 성능 지표인 모터의 수명이 짧음
상대적으로 높은 소음이 발생함

간혹 브러쉬가 마모될때 불꽃이 튈 때도있고, 브러쉬가 마모되어 교체해야하는 일도 있다.
BLDC Motor
고정 자석이 부착된 외부 모터-캔이 회전력을 생성함
브러시의 마찰이 없어 상대적으로 모터의 수명이 김

실제 모터가 돌아가고 있을 때, 겉의 케이스가 돌기때문에 외부에서 껍데기를 고정하거나 잡을 수 없다.
외형적으로 보면 가장큰 차이가 있다. 그리고 BLDC 용어 자체적으로 브러시가 없다, 그러다보니 수명이 길고
소음도 많이 적어지고, 고효율 고출력, 고속회전 등 장점이있다. 구조는 복잡하지만, DC모터에 없는 장점들이 있다.
2) DC모터와 BLDC모터의 차이점
| BLushed DC 모터 | BLushless DC 모터 |
| 브러시를 통하여 전원을 입력함 | 브러시가 없음 |
| 브러시가 모터 회전에 부하가 걸림 | 모터-캔에 툭이 달려있음 |
| DC구동 : 2선 연결(+,-) | 브러시대신 코일에 배선되어있음 |
| 모터는 고정되어있고, 로터(회전자)가 움직임 | DC구동 : 3선 연결(A,B,C) |
| 브러시 마모로 인해 내부에 이물질이 발생하며 수명이 짧음 흑연이다보니 갈아없어져 먼지가들어가 고장날 수 있다. 회전방향을 바꿔줄수있음(연결을 반대로하면) |
브러시 마모가 없어 반영구적으로 사용이 가능함 |
| 모터가 회전하며, 로터는 고정되어 있음 | |
 |
 |
3)BLDC 모터의 회전원리

BLDC모터를 좀더 자세히 보면 내부회전은 전용회선에서 3쌍의 TR에 의해 제어되어 회전하게 된다.
중간 인버터옆 회로가 3개가있다. 그 옆 TR(트랜지 스터) 증폭회로가 있고 3가지 회로에 의해 제어된다.
모터-캔의 회전정보는 홀센서 들의 위치정보에 의해 제어할 수 있고, 3상(A,B,C 3가지 를 가지고있어서 3상)
3상 단자 연결을 통해서 정해진 신호를 통해 제어한다. BLDC모터의 경우 3개의 단자가 A,B,C 또는 UVW로 달리
표시 될순있다. 제조사 마다 다르다. 모두 같은 내용이다.
3개 주어진 단자에서 변제신호 파형으로 나누어 보내게 되고, 이런 파형에서 회전정보를 변경하는 것으로 제어하고있다.

이처럼 극성을 서로 바꾸었을때 정방향이냐, 또는 V와 W를 서로 꼬았느냐에 따라
회전방향을 시계방향과 반시계방향으로 나눌 수 있다.
4) 연결도

왼쪽부터
모타, ESC이고 이것을 ABC극성에 맞춰연결, 배터리, 배터리 체커 이렇게 되어있다.
배터리와 ESC를 거쳐 모터와 연결된 후에 FC에서 모터 변속신호를 ESC에 보내서 ESC모터에 속도를 제어한다.
FC모터 포트에 제어신호가 접수되어야 모터제어가 이루어진다.
2. ESC(Electronic Speed Controller)
전자변속기라고 하며 이 성능에 따라서 드론이 균형을 잘 잡아 날을 수 있고, 속도제어가 된다. 즉 모터에게 중요하다.
1) 역할
전자변속기 : 드론에서 사용하는 Brushless 모터의 속도를 제어하는 제어회로 보통 이게없음 제어가안된다. 모터의 속도에 대한 제어, 모터안에 전기의 흐름을 제어함
전자기 코일에 들어가는 전기 흐름을 제어하여 모터의 토크가 아닌 모터의 회전 속도를 제어함

2) BEC
자체적으로 회로에 전원을 제공할 수 있는 BEC(Battery Eliminator Circuit)가 내장되어있음
BEC가 내장되어 있지 않은 ESC는 OPTO ESC로 분류함

BEC와 ESC의 연결방식은 차이가있다.
BEC회로의 경우 수신기에 공급되는 전력을 확인해야한다. 여러장치로 나뉘어 동작할 경우에 BEC회로 전류공급에 초과
되서 저전압상태로 급변하게 급변하여, 기기에 무리를 주거나 심각한 경우 ESC가 고장나기도한다.
이러한 과전압, 과전류를 예방하기 위해서 BEC를 분리하여, 전원을따로 제공하는 모터방식이 ESC를 사용할 수 있다.

보통 BEC와 ESC의 연결방식에 따른 방법을 알아보면 대부분의 ESC는 BEC방식을 사용한다. 하지만 모든 ESC가 BEC방식
을 사용하지는 않는다. BEC사용시 회로의 과전압, 과전류와 안정적인 BLDC모터의 제어를 위해 BEC를 분리한 모터방식
의 ESC를 사용하는 사용자도 제법있다.
두 방식의 경우 실제 모터와 통신하는 방식은 동일하다. 그래서 두 방식의 ESC는 모양도 비슷하다.
단지 ESC 표기내용에 OPTO와 Ubec 을 표기후 구별하여 사용하고 있다.
옾토방식의 BEC가 없는 ESC 모터 제어 방식과 무선수신기 및 비행컨트롤러와 과학적으로 분리되어있기 때문에
가볍고 작고 소음이 적다. 따라서 요즘은 두 방식을 합쳐 UBEC를 사용한다.
3) ESC를 선택할 때 고려 사항
제일 먼저 전류를 확인하고, 전류는 보통 암페어로 표시된다.
모터가 회전할때 ESC가 처리할수 있는 것 보다 더 많은 전류를 소모하면 모터가 과열되고 , ESC가 고장나게 된다.
1. 허용 전류량
2. 허용 LiPo배터리 셀
모터가 필요로 하는 최대 전류량 보다 큰 ESC를 선택해야 하고, ESC의 허용 전류보다 큰 용량을 소화할 수 있는 배터리를 선택해야함

따라서 처리 되지않는 ESC로 인해 결국 드론이 추락할 수 있는 상황이 일어날수 있다.
전류 소모량을 늘리고, ESC에 더 많은 스트레스를 줄수있는 3가지 요인은
1. 모터의 KV
2. 모터의 크기
3. 프로펠러 길이와 피치
전류소모량을 계산할때 3가지 항목을 고려해서 배터리나 ESC를 선택해야한다.
배터리 허용 전류량과 셀 을 고려해야하는데 모터가 필요로하는 최대 전류량 보다 더큰 ESC를 선택해야 모터에 무리가없다.
4) ESC 프로세서
Chip 제조사로는 ATMEL, SILABS, BusyBee 등이 있음

ESC는 개별적인 성능보다는 FC와 통신의 속도가 성능에 더중요한 요소이다. FC와 ESC의 통신 방법은 드론의 성능개선으로
계속발전 되어오고 있다. esc의 성능과 펌웨어 업그레이드를 위해 사용되는 프로세서와 부트로더를 반드시 확인해야한다. ESC프로세서 별 설정방법은 ESC제조사 홈페이지 를 통해 확인가능하다.
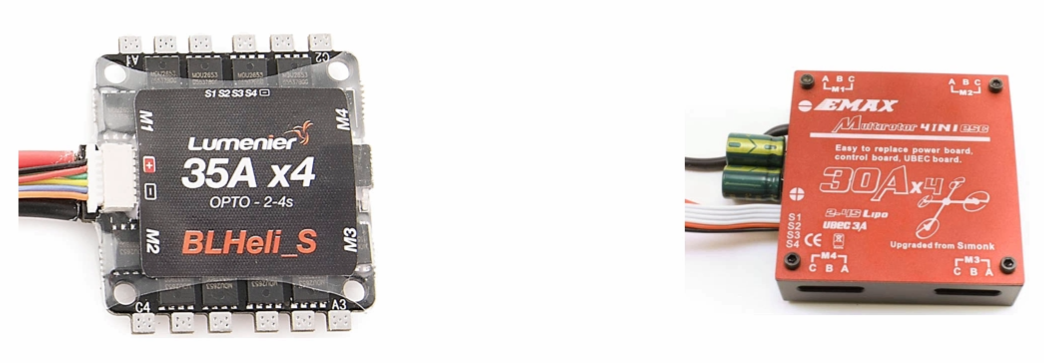
5) 4in 1 ESC
개별적 ESC를 1개의 보드에 통합한 일체형 ESC

포인원 이에스씨라고한다. ESC의 편리한 사용을 위해서 포인원 ESC를 요새는 많이 사용하고 있는 추세이다.
기본적으로 판매되고있는 포인원 ESC는 FC, 또는 PDP 와 동일한크기의 단일보드에 통합 되고있어서 배선정리없이
편하게 할 수 있다. 왼쪽은 배선이 여러가지인데, 오르쪽은 전원만 2개넣어주면 되는 경우이다.
단일 ESC의 경우는 일부 모듈의 고장은 전체보드의 고장으로 이어질수 있다. 그럼에도 불구하고, 제작에 편리성과 간결성 또는 소형의 장점으로 많이 사용되고있다.
6) ESC 펌웨어 성능 비교
SimonK와 BLHeli 의 공통점
대표적인 ESC펌웨어 제작사
오픈 소스로 시작하여 사용자들이 자발적으로 펌웨어를 제작함
SimonK는 업데이트를 중단하여 BLHeli만 사용되고 있음
현재 보고있는 것이 가장많이 사용되어지고있는 펌웨어가 탑재되어있는 ESC이다.
멀티콥터에서 가장 오래, 인기있는 것이다. 보통 오픈소스로 시작되었는데 유저층이 넓어지면 유료화하는 식으로 과정을 겪었고
예전에는 제조업에서 만든 펌웨어가 최적화된게 아니었기 때문에 사용자들이 스스로 개발한 펌웨어를 부분적으로
업그레이드 하고 적용하는 경우가 있었지만, 그것이 안정화되면서 표준 펌웨어가 되고, 대부분 ESC에 표준화가 이루어져서 지금은 많이 활용 되는 추세이다.
그래서 대부분의 사용자는 다양한 기능과 사용자 친화적인 인터페이스에 의해서 BLHeli를 많이 쓰고있다.
7) ESC별 통신제어방식의 차이점
| 통신방식 | 세부내용 |
| PWM | 기본적인 정보 송신 방법으로 일정 간격으로 들어노는 신호를 받는 방식이다. |
| Oneshot125 | FC의 동작 속도에 동기화하여 신호를 전달함 2.66kHz(125~250us)의 속도를 가지고 있다. 많이 사용하는 방법으로 Activce Braking기능을 사용할 수 있음 |
| Oneshot42 | 하드웨어의 성능을 올려 최대 8kHz의 속도로 통신하는 방법이다. 예 ) Kiss사의 24A Race edition ESC |
| Multishot | F4 Fc를 대응하기 위해 개발된 방식이다. 5~25us주기 신호를 사용해서 Oneshot대비 10배 빠른 속도를 나타냄 |
| Dshot | FC의 STM32 Signal jitter가 없고 해상도는 11bit로 총 2048단계를 나타냄 디지털 신호 사용으로 켈리브레이션이 필요없다. |
PWM이 가장오래되었고, 최근엔 디샷이 많이 채책된다. 특히 켈리브레이션이 필요없는장점때문에 굉장히 사용되고있는 추세다.
PWM, 멀티샷, 디샷 등 가장 핫한 방식이다.
8) ESC수신기 사이에 정보 송신 신호의 교정
드론 조립, 제작시 ESC를 개별적으로 수신기하고 무선송수신기하고 셋팅울 해주어야하는 단계가있다.
사전에 ESC와 수신기 사이에 정보, 통신채널을 맞춰주는 작업이 필요하다. 이것을 ESC셋팅이라고 한다.
Simple ESC Calibration || by Atechtechnology - YouTube
'전공공부 > 드론 공학' 카테고리의 다른 글
| 드론의 구성요소(4) (0) | 2021.11.02 |
|---|---|
| 드론의 구성요소(3) (0) | 2021.11.02 |
| 드론의 구성요소(1) (0) | 2021.10.25 |
| 드론공학-민간용드론활용분야 (0) | 2021.10.14 |
| 드론공학-민간용 드론 (0) | 2021.10.14 |




댓글